ACAM_64 produit des images animées en temps réel montrant les sources sonores dans son champ de vision. La caméra peut être utilisée pour trouver, mesurer, suivre et enregistrer des sources sonnores.
Démontre la résolution et le temps de réponse des ACAM_64
Claquement des doigts
Démontre la directivité du formateur de faisceau acoustique
Directivité des grillons
Démontre la capacité de suivi des ACAM_64
Deux voitures
Démontre la capacité de suivi des ACAM_64
Camion unique
Démonstration de la fonction de lecture d'une vidéo précédemment enregistrée
Système de ventilation
Démonstration de la fonction de lecture d'une vidéo précédemment enregistrée
Extracteur de gaz
La tablette et le support de tablette ne sont pas inclus avec le ACAM_64.
Principe de fonctionnement
Une caméra acoustique produit une image où l’intensité de chaque pixel représente l’amplitude des ondes acoustiques provenant de la direction correspondante. Ce processus est similaire à une caméra optique produisant une image où chaque pixel représente l’intensité de la lumière provenant de la direction correspondante.
Pour une caméra optique, l’objectif focalise la lumière provenant d’une certaine direction vers le pixel correspondant sur le capteur. Chaque pixel de l’image représente l’intensité de la lumière provenant d’un azimut (angle dans le plan horizontal) et d’une élévation (angle dans le plan vertical) spécifiques. Pour ce faire, l’objectif retarde les ondes lumineuses qui frappent l’objectif de la bonne valeur, de sorte que toutes les ondes provenant d’une certaine direction arrivent en phase dans le plan focal à la position du pixel correspondant.
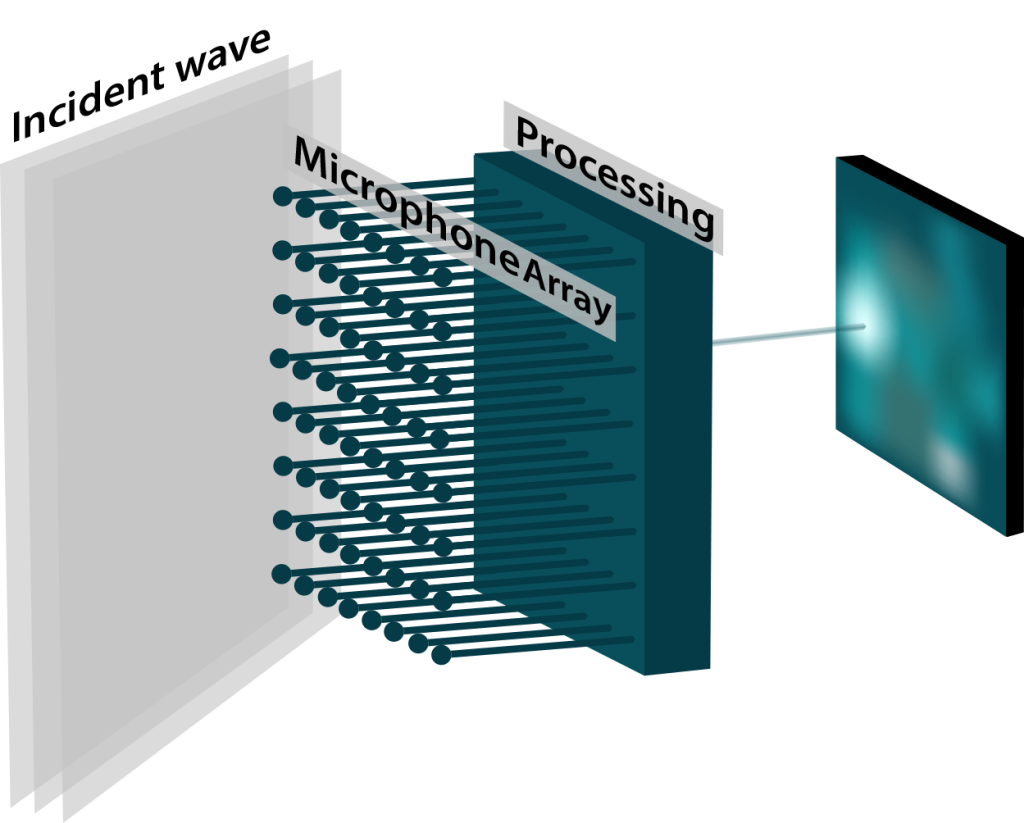
Une caméra acoustique fait la même chose, sauf que le travail de l’objectif est remplacé par un moteur de calcul numérique qui traite les signaux capturés par un réseau de microphones (voir la figure 1).
Un ensemble de microphones capte les ondes sonores qui frappent le réseau dans de nombreuses directions différentes. Pour chaque pixel, un moteur de traitement numérique massivement parallèle applique des retards spécifiques et additionne les signaux de chaque microphone, de sorte que les signaux provenant d'un angle d'incidence spécifique (azimut et élévation) arrivent en phase. La figure 1 illustre ce processus pour un pixel spécifique. Notez que pour chaque flèche du réseau de microphones, un retard différent doit être appliqué, correspondant à l'angle d'incidence spécifique et au pixel correspondant. Dans la mise en œuvre la plus simple, l'intensité du pixel est calculée comme l'énergie de cette somme du signal, calculée en moyenne sur un temps ajustable.
Possibilités
Comme le traitement est mis en œuvre numériquement, Certaines fonctionnalités sont possibles, qui ne le sont pas pour une caméra optique:
La somme des signaux acoustiques correspondant à une position de pixel particulière peut être rendue disponible pour être écoutée. Ce processus est appelé « beamforming ». Le réseau de microphones peut être dirigé numériquement à l’angle d’incidence correspondant à n’importe quel pixel dans le champ de vision et se concentrer sur cette source. De plus, comme l’image montre l’azimut et l’élévation de la source la plus forte dans le champ de vision de la caméra, le « beamformer » peut suivre cette source lorsqu’elle se déplace dans le champ de vision.
Un filtre peut être appliqué au traitement, de sorte que la caméra ne soit sensible qu’à certaines fréquences. De plus, ce filtre peut être ajusté en temps réel, pendant que les images sont capturées.
Le temps d’intégration utilisé pour calculer l’énergie de la somme du signal pour chaque pixel peut être ajusté. C’est ce qu’on appelle la « persistance » de l’image et est très similaire au concept de vitesse d’obturation pour un appareil photo optique. Avec une persistance plus longue, l’image résultante est plus claire et moins bruyante, mais les images successives s’estompent les unes dans les autres, ce qui rend plus difficile le suivi de scènes hautement dynamiques.
Fréquence, taille de l'ouverture et résolution de l'image
Pour une caméra optique, ainsi que pour une caméra acoustique, la résolution de l’image est proportionnelle au rapport entre la taille de l’ouverture et la longueur d’onde.
Pour une caméra optique, la taille de l’ouverture de la caméra (la taille de l’objectif ou plus généralement du collecteur de lumière) est toujours très large par rapport aux longueurs d’onde d’intérêt. Cela est vrai même pour les très petits objectifs, comme ceux que l’on trouve dans les téléphones intelligents, où la taille de l’objectif est de quelques mm, tandis que les longueurs d’onde d’intérêt sont de l’ordre de centaines de nm (plus de 1000 fois plus petites). Pour un appareil photo optique, la résolution est rarement limitée par la taille de l’ouverture.
Pour une caméra acoustique en revanche, les fréquences d’intérêt s’étendent souvent à des fréquences assez basses (grandes longueurs d’onde). Par exemple, la longueur d’onde à 100 Hz est de 3.4 m. Pour avoir une résolution raisonnable à une fréquence aussi basse, il faudrait un réseau d’au moins 8 à 10 fois plus grand (25 à 30 m de large). Ce n’est généralement pas pratique. Par conséquent, pour les caméras acoustiques, la résolution est généralement médiocre aux basses fréquences et s’améliore à mesure que la fréquence augmente.
Échantillonnage spatial et limite supérieure de fréquence
Pour une caméra acoustique, la fréquence maximale est limitée par la séparation spatiale entre deux microphones adjacents. La demi-longueur d’onde de la fréquence maximale échantillonnée par les microphones doit être plus large que la distance entre deux microphones. Sinon, le réseau n’est pas capable de faire la distinction entre les sources qui se trouvent dans le champ de vision et les sources qui se trouvent à l’extérieur, ce qui entraîne des artefacts tels que des images fantômes.
Pour ACAM_64, la distance entre les microphones est de 23 mm, ce qui permet d’imager correctement les fréquences jusqu’à 7.5 kHz. En pratique, le réseau est échantillonné à 16 kHz, avec une fréquence de Nyquist de 8 kHz. Les filtres anti-repliement de la caméra garantissent que l’énergie du signal est faible au-dessus de 7.5 kHz.
Champ de vision (FOV)
Le champ de vision d’une caméra représente le nombre de degrés que la caméra peut voir (qui sont représentés dans l’image) dans le plan horizontal (azimut) et le plan vertical (élévation).
Pour ACAM_64, le champ de vision est le même en azimut et en élévation (l’image est carrée). Deux valeurs sont possibles:
90 degrés (-45 degrés à +45 degrés de gauche à droite et de bas en haut)
60 degrés (-30 degrés à +30 degrés de gauche à droite et de bas en haut)
Description
ACAM_64 est un réseau de microphones 8×8 et un « beamformer » temps réel. La caméra peut créer une image de 32×32 pixels de sources sonores en temps réel, avec une réponse en fréquence réglable de 20 Hz à 8 kHz.
Son moteur de traitement du signal massivement parallèle permet à l’instrument de construire chaque pixel simultanément sans manquer d’échantillon.
L’instrument peut être contrôlé et les images peuvent être récupérées à l’aide d’un protocole ouvert basé sur un port Com virtuel. Ce protocole ouvert peut être utilisé sur n’importe quelle plate-forme dotée d’un pilote CDC USB générique. Cela inclut Windows, Linux et Mac-OS.
L’instrument peut diffuser l’audio de sortie du beamformer sur la plate-forme hôte via une interface USB-Audio. Grâce à cette interface, l’instrument est perçu par l’hôte comme un microphone USB. Ce signal audio peut être dirigé numériquement vers n’importe quel azimut et élévation dans le champ de vision de la caméra. À l’aide de l’application Windows fournie, le beamformer peut même suivre dynamiquement n’importe quelle source acoustique dans le champ de vision.
Cette interface USB-Audio fonctionne sur n’importe quelle plate-forme dotée d’un pilote USB-Audio générique. Cela inclut Windows, Linux et Mac-OS.
Une application Windows complète est fournie pour faire fonctionner la caméra, visualiser et enregistrer des images de la source sonore. La résolution finale de l’image est de 128×128.
La caméra acoustique ACAM_64 est un périphérique composite USB qui comprend plusieurs interfaces avec leurs propres descripteurs. Pour s’assurer que les trois interfaces fonctionnaient correctement ensemble et pouvaient être soutenues par le MCU sans problèmes de synchronisation, ils ont utilisé l’analyseur de protocole USB 480 Beagle dans toutes les phases de développement, y compris les tests, le débogage et la validation finale.
Vous souhaitez en savoir plus sur les fonctionnalités et les spécifications de notre nouvelle caméra acoustique, ACAM_64 ?